Team Orange SEED Official Web Site
TOP MAIN INFORMATION RULE MEMBERS ROBOT MINIROBO ANIMATION LINK
HISTORIC ROBOTS
Orange-Setoka Sei Ver.1.00 (2011.8)
名称の由来:
みかんの品種である瀬戸香が由来です.
清らかでまじりけがないという意味から精粋(せいすい)の一文字を取っています.
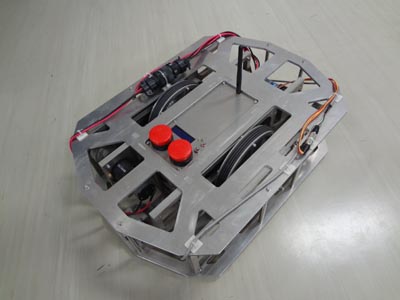
目的:
車輪型走行系駆動部の設計を確立することを目的としました.
結果:
無事,車輪型走行系駆動部の設計を確立しました.
今後:
Ver.2.00として,軽量化を試みます.
Orange-Setoka Iki Ver.1.00 (2011.9)
名称の由来:
みかんの品種である瀬戸香が由来です.
清らかでまじりけがないという意味から精粋(せいすい)の一文字を取っています.
目的:
チェビシェフリンク機構の設計を確立することを目的としました.
結果:
製作時間の関係上,図面のみの完成で終わりました.
今後:
Ver.2.00にて,実機の製作を試みます.
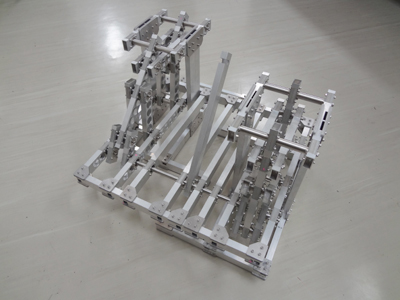
Orange-Setoka Sei Ver.2.00 (2011.10)
名称の由来:
みかんの品種である瀬戸香が由来です.
清らかでまじりけがないという意味から精粋(せいすい)の一文字を取っています.


目的:
車輪型走行系駆動部の軽量化を目的としました.
結果:
無事,車輪型走行系駆動部の軽量化に成功しました.
今後:
更なる軽量化およびユニット化を試みます.
Orange-Setoka Iki Ver.2.00 (2011.10)
名称の由来:
みかんの品種である瀬戸香が由来です.
清らかでまじりけがないという意味から精粋(せいすい)の一文字を取っています.


目的:
チェビシェフリンク機構の設計を確立することを目的としました.
結果:
理論値の確認が行えました.しかし,強度不足で歩くことが出来ませんでした.
今後:
より実戦に近い設計を試みます.
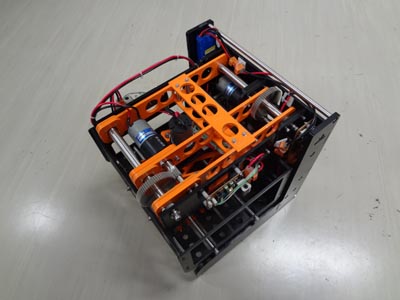
Orange-Shamouti Ver.1.00 (2011.12)
名称の由来:
みかんの品種である中生種シャムーティが由来です.

目的:
ワイヤーカットを用いた高密度設計を目的としました.
結果:
スライド機構に問題がありましたが,基本設計に問題が出ませんでした.
今後:
OrangeProjectオリジナルの回路を組み込む必要があることを改めて実感しました.

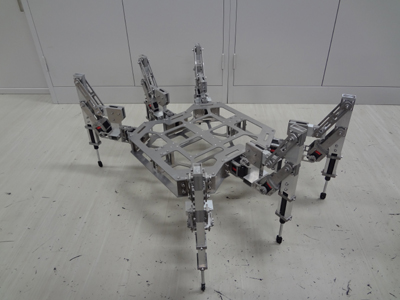
Orange-Blood Doblefina Ver.2.00 (2012.05)
名称の由来:
みかんの品種であるブラッドオレンジのドブレヒナが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.

目的:
チェビシェフリンク機構の設計を確立することを目的としました.
結果:
本番に十分耐えうる強度と精度を保つことができました.
今後:
Ver.3.00にて,軽量化およびコストパフォーマンスの向上を図ります.
Orange-Blood Doblefina Ver.3.00 (2012.06)
名称の由来:
みかんの品種であるブラッドオレンジのドブレヒナが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.

目的:
チェビシェフリンク機構の設計を確立することを目的としました.
結果:
コストパフォーマンスを大幅に向上し,軽量化にも成功しました.
今後:
今年度の大幅な改良は終了し,マイナーアップを図ります.
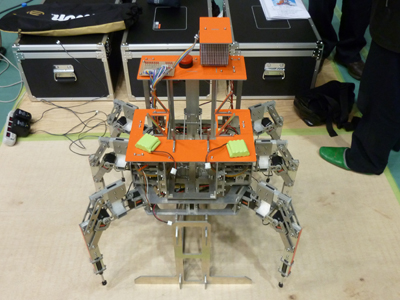
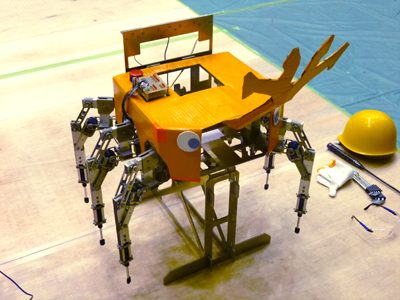
Orange-Blood Ruby Ver.1.00 (2012.07)
名称の由来:
みかんの品種であるブラッドオレンジのルビーブラッドが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
目的:
6足歩行機構の設計を確立することを目的としました.
結果:
コスト的問題により12自由度に制限したため,ロンリウムプレーンで滑る現象が発生しました.
今後:
18自由度に拡張して,ロバスト性を高めます.
Orange-Bigarade Ver.1.00 (2012.10)
名称の由来:
みかんの品種であるビガラードが由来です.

目的:
一連の動作を行えることを目標としました.
結果:
無事,動作することができました.
今後:
特になし.


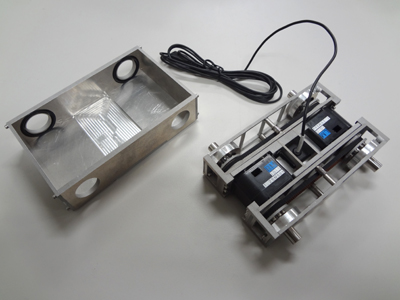
Orange-Sweetie Ver.1.00 (2013.1)
名称の由来:
みかんの品種であるスウィーティが由来です.

目的:
下水管探査用ロボットの試作機の開発を目標としました.(共同研究)
結果:
無事,動作することができました.
今後:
更なるコンパクト化,高度化を目指します.
Orange-Doblefina Ver.3.50 (2013.4)
名称の由来:
みかんの品種であるブラッドオレンジのドブレヒナが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
目的:
チェビシェフリンク機構に足を取付,問題点を洗い出すことを目的としました.
結果:
問題点が洗い出されました.
今後:
問題点を解決し,確実に歩行できるチェビシェフリンク機構を作成します.
Orange-Navelate Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるナベラーテが由来です.


目的:
新しい機構を用いて歩くことを目的としました.
結果:
練習ではうまく動きましたが,本番では動くことができませんでした.
今後:
新たに改良を加え,技術を確立したいです.
Orange-Bihianinha Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるバイアニーニャが由来です.
目的:
RCサーボモータによる車輪駆動で走ることを目的としました.
結果:
練習ではうまく動きましたが,本番では動くことができませんでした.
今後:
新たに改良を加え,技術を確立したいです.
Orange-Pera Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるペラが由来です.


目的:
チェビシェフリンク機構を用いて歩くことを目的としました.
結果:
練習ではうまく動きましたが,本番では動くことができませんでした.
今後:
新たに改良を加え,技術を確立したいです.
Orange-Chinotto Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるチノットが由来です.
目的:
RCサーボモータによる車輪駆動で走ることを目的としました.
結果:
練習ではうまく動きましたが,本番では動くことができませんでした.
今後:
新たに改良を加え,技術を確立したいです.
Orange-Himenotuki Micro Speaker Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるひめのつきが由来です.
Orange-Himenotukiは,本校の軽音部とのコラボ企画で音楽関連で開発されたものの総称となりま
す.第一弾は,マイクロスピーカーです.
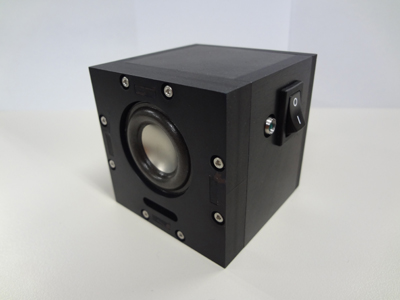
目的:
机上でエレキーギターの練習ができることをコンセプトに開発を進めています.
結果:
小型で大音量のマイクロスピーカーの製作に成功しました.
今後:
マイクロスピーカーの改良とエフェクタ関連の開発を行っていく予定です.
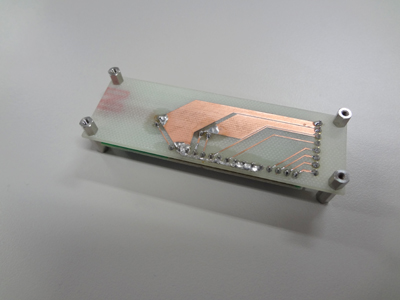
LCD Driver Ver.0.10 (2013.11)
名称の由来:
いろいろな装置に使用するため,今回はみかんの品種の名前を使用していません.
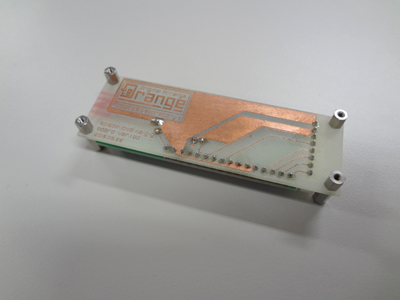
目的:
頻繁に使用しているLCDの回路を正式に基板に起こすことを目的とします.
結果:
正常に動作することを確認することができました.
今後:
基板外注のために,外注先の仕様に変更する予定です.
LCD Driver Ver.0.50 (2013.11)
名称の由来:
いろいろな装置に使用するため,今回はみかんの品種の名前を使用していません.
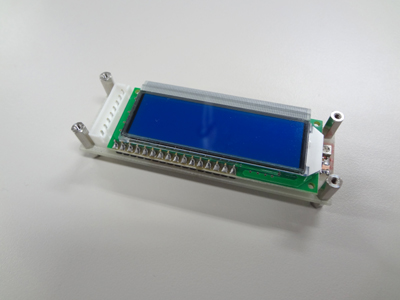
目的:
頻繁に使用しているLCDの回路を正式に基板に起こすことを目的とします.
結果:
外注先の仕様に変更し,正常に動作することを確認することができました.
今後:
基板を外注し,完成させる予定です.
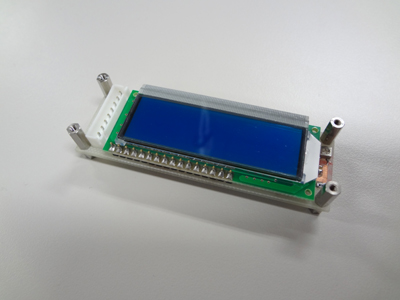
LCD Driver Ver.1.00 (2013.11)
名称の由来:
いろいろな装置に使用するため,今回はみかんの品種の名前を使用していません.
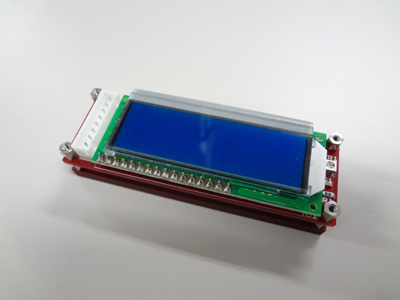

目的:
頻繁に使用しているLCDの回路を正式に基板に起こすことを目的としました.
結果:
外注基板で正常に動作することを確認することができました.
今後:
現時点で予定はありません.
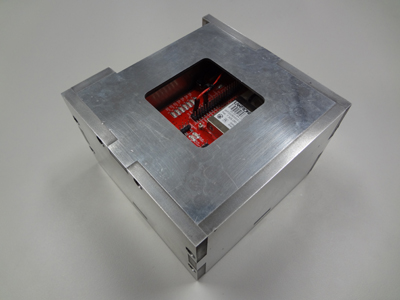
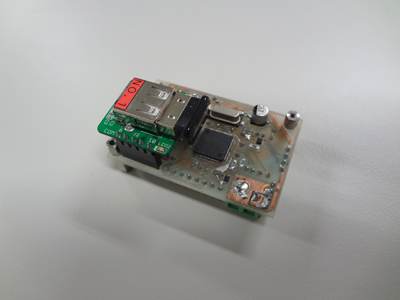
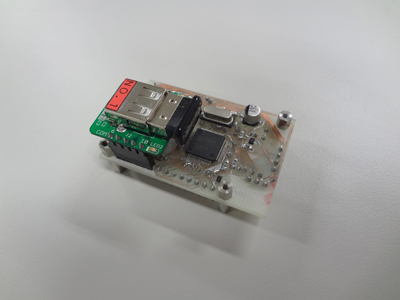
Orange-Sweetie Driver Ver.0.50 (2013.11)
名称の由来:
みかんの品種であるスウィーティが由来です.
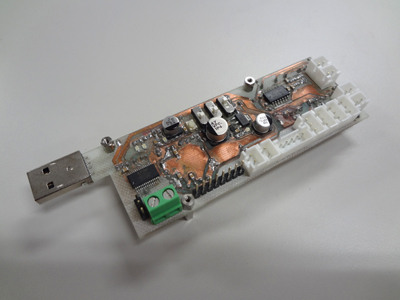
目的:
下水管探査用ロボットの試作機用の新たな制御基板の開発を目的としました.(共同研究)
結果:
制御部のコンパクト化に成功しました.
今後:
基板を外注し,完成させる予定です.
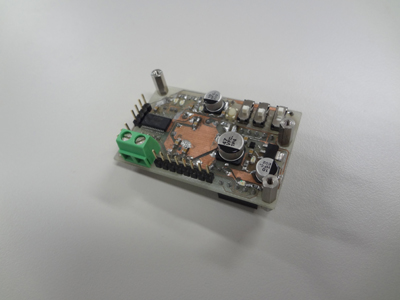
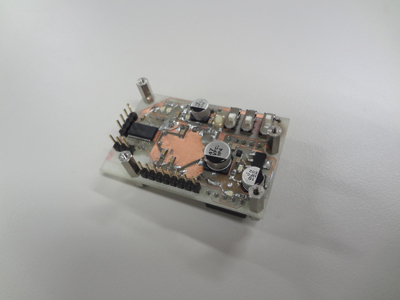
Orange-Sweetie Driver Ver.1.00 (2013.11)
名称の由来:
みかんの品種であるスウィーティが由来です.
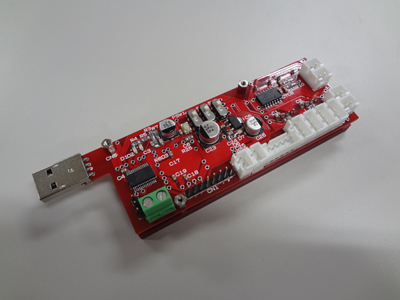

目的:
下水管探査用ロボットの試作機用の新たな制御基板の開発を目的としました.(共同研究)
結果:
外注基板で正常に動作することを確認し,コンパクト化に成功しました.
今後:
現時点で予定はありません.
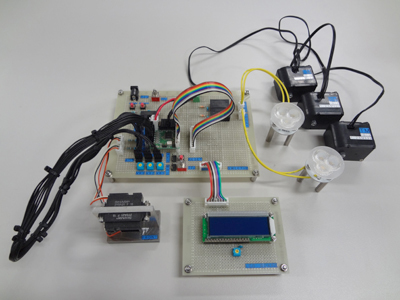
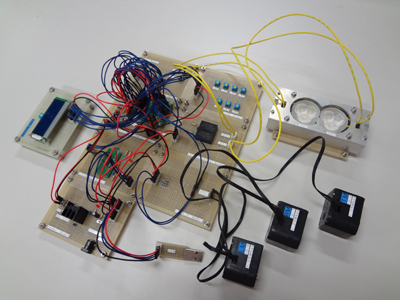
Orange-Blood Maltese Ver.1.50 (2013.11)
名称の由来:
みかんの品種であるマルチーズが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
目的:
ミニロボ専用制御部の開発を目的としました.
結果:
PS3のコントローラによる制御に成功しました.
今後:
接続ケーブルを減らす予定です.
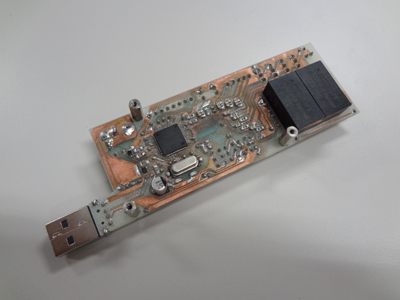
Orange-Blood Maltese Ver.1.60 (2013.11)
名称の由来:
みかんの品種であるマルチーズが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
目的:
ミニロボ専用制御部の開発を目的としました.
結果:
電源ケーブルとRCサーボモータの共有化に成功しました.
今後:
基板を外注し,完成させる予定です.
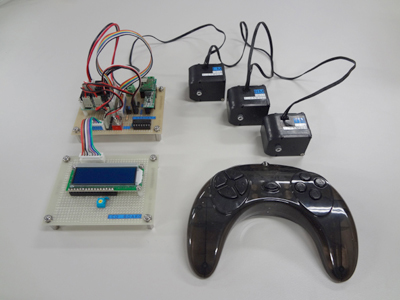
Orange-Blood Maltese Ver.2.00 (2013.11)
名称の由来:
みかんの品種であるマルチーズが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
目的:
ミニロボ専用制御部の開発を目的としました.
結果:
外注基板で正常に動作することを確認し,コンパクト化に成功しました.
今後:
通信基板を独自開発し,その他のゲームコントローラにも対応する予定です.
ミニロボフィールド Ver.1.00 (2013.12)

目的:
ミニロボットコンテスト2013に使用することを目的として,作成しました.
結果:
ミニロボットコンテスト2013も無事,開催することができました.
今後:
現時点で予定はありません.
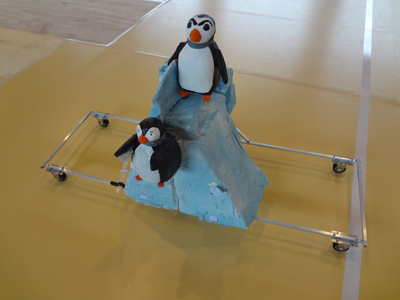
Orange-Harehime Ver.1.00 (2013.12)
名称の由来:
みかんの品種であるはれひめが由来です.
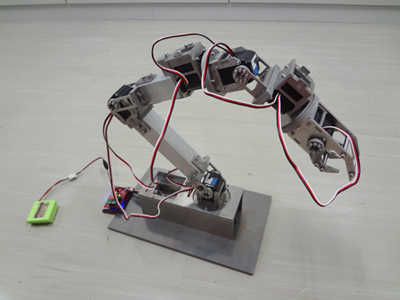
目的:
レスキューロボットに使用する共通マニピュレータの開発を目的としました.
結果:
正常に動作することを確認したが,トルク不足であることが判明しました.
今後:
モータを高出力トルクタイプに変更して,正常動作させる予定です.
Orange-Blood Doblefina Ver.4.00 (2014.02)
名称の由来:
みかんの品種であるブラッドオレンジのドブレヒナが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.

目的:
チェビシェフリンク機構に足を取付,歩行することを目的としました.
結果:
無事,歩行することが可能となりました.
今後:
旋回機構を追加し,確実な歩行と旋回ができるチェビシェフリンク機構を作成します.
Orange-Blood Doblefina Ver.4.50 (2014.04)
名称の由来:
みかんの品種であるブラッドオレンジのドブレヒナが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
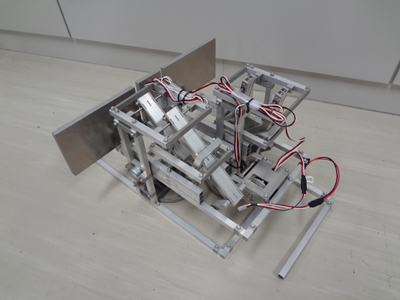
目的:
チェビシェフリンク機構に足と旋回機構を取付,歩行・旋回することを目的としました.
結果:
無事,歩行・旋回することが可能となりました.
今後:
現時点で予定はありません.
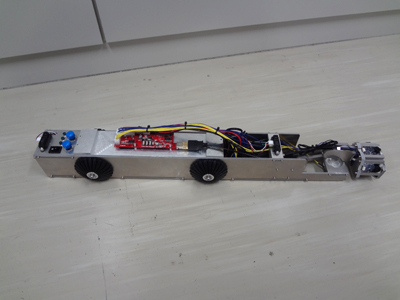
Orange-Sweetie Ver.3.00 (2014.04)
名称の由来:
みかんの品種であるスウィーティが由来です.
目的:
下水管探査用ロボットの試作機の開発を目標としました.(共同研究)
結果:
ハードウェアのモジュール化に成功し,メンテナンス性が向上しました.
今後:
更なるコンパクト化,高度化を目指します.
Orange-Harehime Ver.2.00 (2014.8)
名称の由来:
みかんの品種であるはれひめが由来です.

目的:
レスキューロボットに使用する共通マニピュレータの開発を目的としました.
結果:
正常に動作することを確認しました.
今後:
別メーカのモータに変更し,軽量化および防水化を行う予定です.
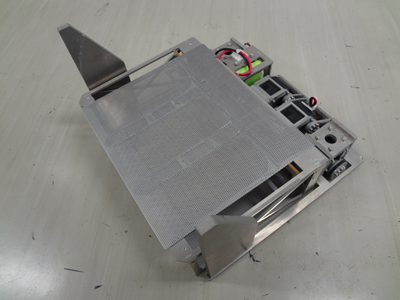
Orange-Sweetie Ver.3.10 (2014.09)
名称の由来:
みかんの品種であるスウィーティが由来です.
目的:
下水管探査用ロボットの試作機の開発を目標としました.(共同研究)
結果:
ハードウェアのモジュール化に成功し,メンテナンス性が向上しました.
今後:
更なるコンパクト化,高度化を目指します.
Orange-Benimadonna Ver.1.00 (2014.11)
名称の由来:
みかんの品種である紅マドンナが由来です.


目的:
RCサーボモータのみで構成することを目的としました.
結果:
フィールドの設計誤差の関係で,うまく動作することができませんでした.
今後:
柔軟性を増した改良機を製作する予定です.
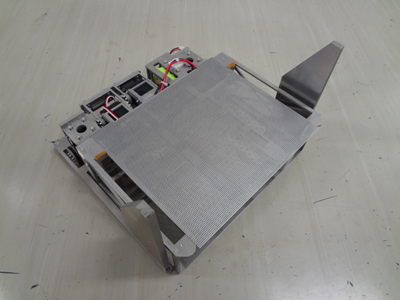
Orange-Sweetie Ver.4.00 (2015.03)
名称の由来:
みかんの品種であるスウィーティが由来です.
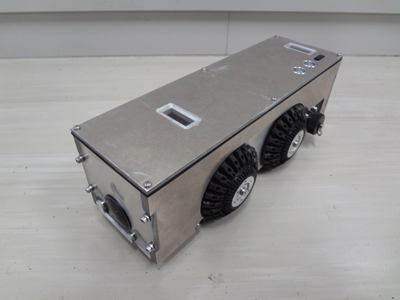
目的:
下水管探査用ロボットの試作機の開発を目標としました.(共同研究)
結果:
コンパクト化に成功しました.また,防水性が向上しました.
今後:
メンテナンス性を向上するために,マイナーチェンジを行う.
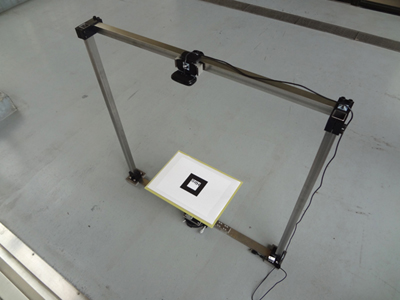
Orange-Oroblanco Ver.1.00 (2015.09)
名称の由来:
みかんの品種であるスウィーティが由来です.

目的:
下水管探査用ロボットの位置計測器の開発を目標としました.
結果:
位置計測器の試作機製作に成功しました.
今後:
アプリケーションに対応するため,一部改良を行う.
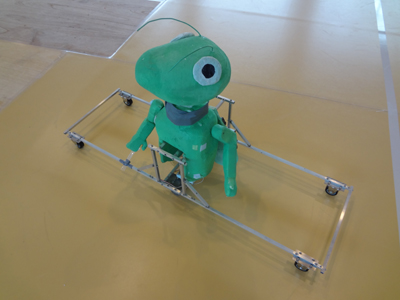
Orange-Himemadonna Ver.1.00 (2015.10)
名称の由来:
みかんの品種である紅マドンナが由来です.


目的:
ガイドモニタを取り付け,マスコットキャラクタ(マーレちゃん)を表示することを目的としました.
結果:
得点を取るという当初の目的を達成しました.
今後:
移動速度を向上する予定です.
Orange-Harehime Ver.3.00 (2015.12)
名称の由来:
みかんの品種であるはれひめが由来です.

目的:
レスキューロボットに使用する共通マニピュレータの開発を目的としました.
結果:
モータの変更しました.
今後:
専用制御基板の製作を行い,手先制御を行う予定です.
Orange-Oroblanco Ver.1.10 (2016.04)
名称の由来:
みかんの品種であるスウィーティが由来です.
目的:
下水管探査用ロボットの位置計測器の開発を目標としました.
結果:
アプリケーションに対応するため,一部改良を行いました.
今後:
自動化に向けての改良を行う.
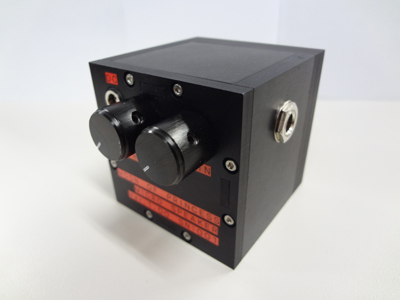
Orange-Himenotuki Micro Speaker Ver.2.00 (2016.09)
名称の由来:
みかんの品種であるひめのつきが由来です.
Orange-Himenotukiは,本校の軽音部とのコラボ企画で音楽関連で開発されたものの総称となりま
す.第一弾は,マイクロスピーカーです.

目的:
机上でエレキーギターの練習ができることをコンセプトに開発を進めています.
結果:
量産型のマイクロスピーカーの製作に成功しました.
今後:
エフェクタ関連の開発を行っていく予定です.
Orange-Blood Maltese Ver.3.00 (2016.09)
名称の由来:
みかんの品種であるマルチーズが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
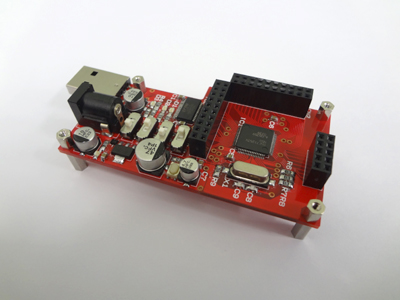

目的:
汎用的な制御基板の開発を目的としました.
結果:
外注基板で正常に動作することを確認し,シールド装着が可能となりました.
今後:
オリジナルのシールドを開発し,基板の拡張を行う予定です.
Orange-Blood Robocon Shield Ver.1.00 (2016.10)
名称の由来:
みかんの品種であるマルチーズが由来です.
ロボットの心臓部にあたる駆動系は全てブラッドオレンジ系列の名前で統一されています.
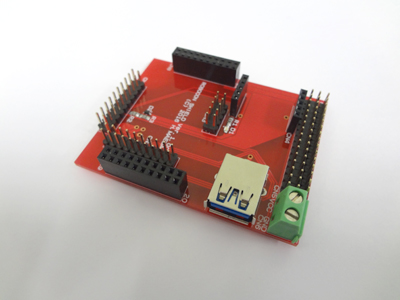
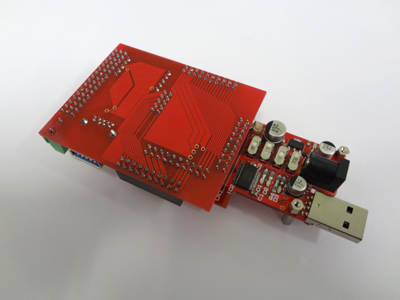
目的:
Maltese専用シールドとして,ロボコンの制御を実現することを目的としました.
結果:
外注基板で正常に動作することを確認し,ロボコンに使用することができました.
今後:
現時点で予定はありません.
Orange-Aika2 Ver.1.00 (2016.10)
名称の由来:
みかんの品種である紅マドンナが由来です.


目的:
今年も得点することを目的としました.
結果:
得点を取るという当初の目的を達成しました.
今後:
現時点で予定はありません.
Orange-Aika8 Ver.1.00 (2016.10)
名称の由来:
みかんの品種である紅マドンナが由来です.

目的:
今年も得点することを目的としました.
結果:
得点を取るという当初の目的を達成しました.
今後:
現時点で予定はありません.
Copyright (C) 2012 Orange Project All Rights Reserved.