Team Orange Official Web Site
RESEARCH HISTORY
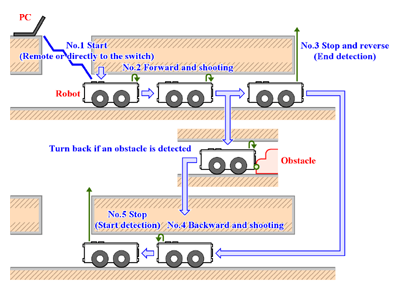
船舶探査用レスキューロボットの研究開発 -第1報:試作機開発のための基礎実験- (2017.2)
発表場所:
弓削商船高等専門学校紀要 39号
研究目的:
船舶火災における探査活動が可能なレスキューロボットの研究


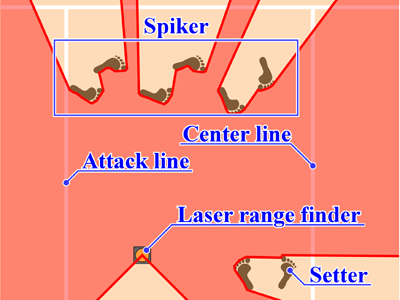
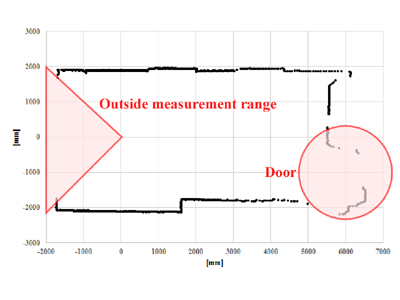
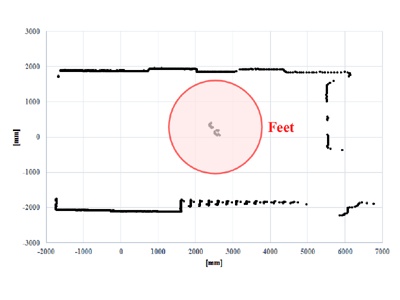
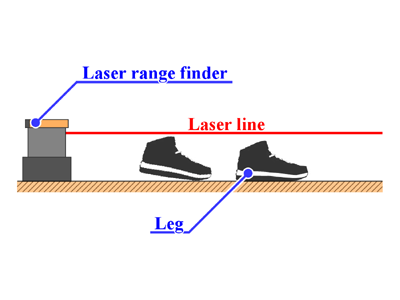
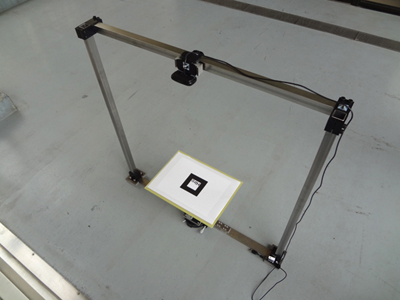
バレーボールのスパイク助走評価に関する研究
~第1報:レーザレンジファインダを用いた計測装置の開発~ (2017.2)
発表場所:
平成28年度情報工学科卒業研究概要集
研究目的:
バレーボールにおけるスパイク助走軌跡計測器の開発
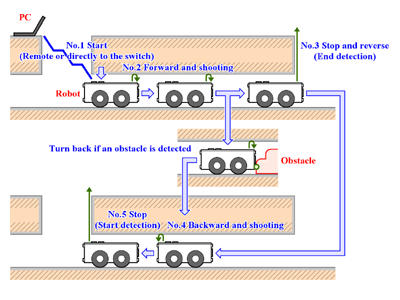
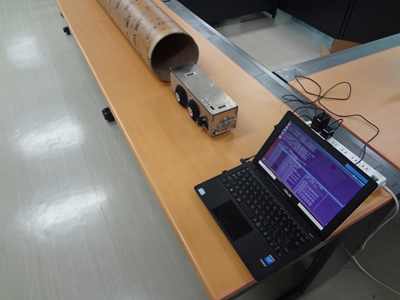
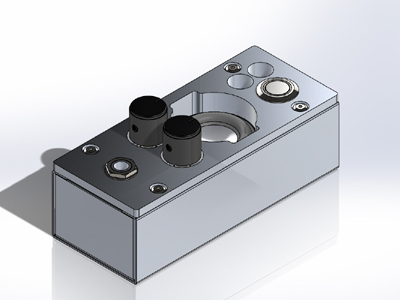
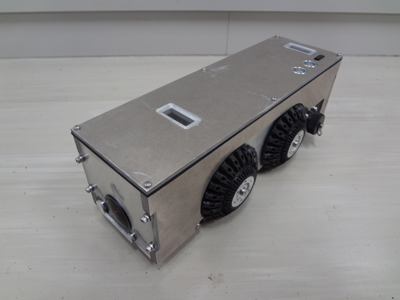
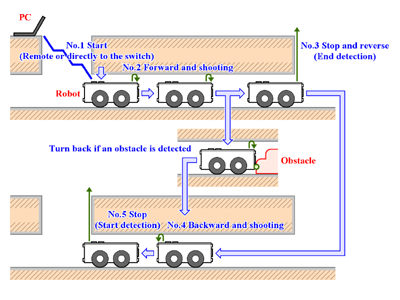
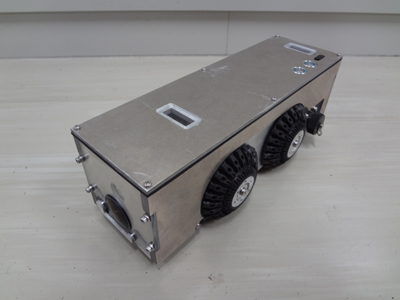
小型配管検査ロボットに関する研究
~第6報:配管検査ロボットの自己位置推定に関する研究~ (2017.2)
発表場所:
平成28年度情報工学科卒業研究概要集
研究目的:
配管探査ロボットの自己位置推定に関する研究


小型配管検査ロボットに関する研究 ~第7報:自己位置計測器の精度向上~ (2017.2)
発表場所:
平成28年度情報工学科卒業研究概要集
研究目的:
配管探査ロボットの自己位置計測器に関する研究
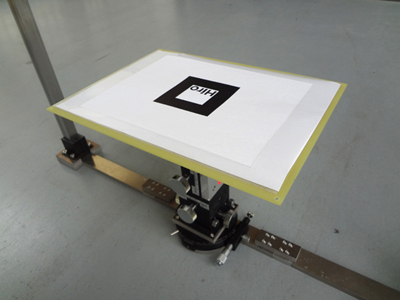
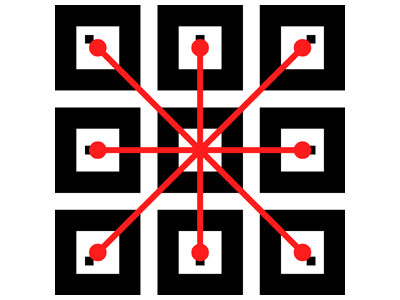
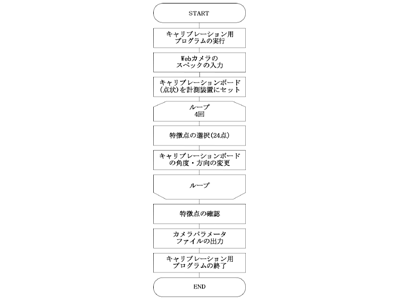
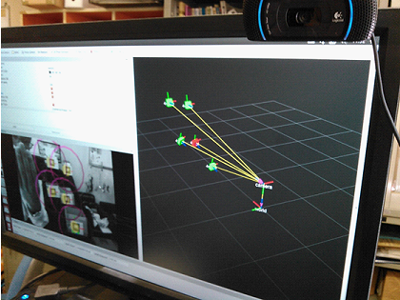
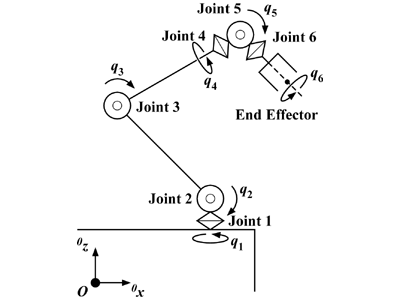
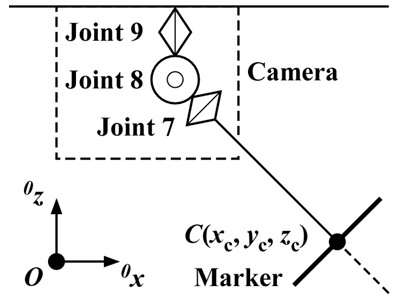
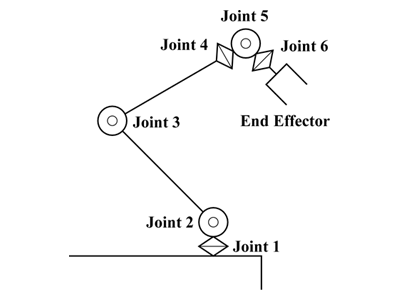
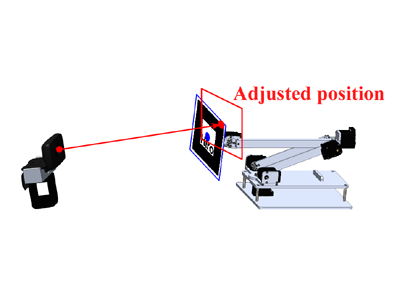
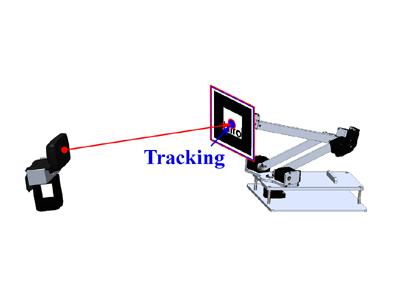
マニピュレータを用いたマーカ追従によるキャリブレーションの提案 (2017.2)
発表場所:
平成28年度生産システム工学専攻特別研究概要集
研究目的:
災害探査活動支援用モバイルロボット群の半自律化とインターネット遠隔制御のための
共通マニピュレータ開発に関する研究
レーザレンジファインダを用いたスパイク助走軌跡の計測 (2017.3)
発表場所:
日本機械学会中国四国学生会第47回学生員卒業研究発表講演会講演前刷集
研究目的:
バレーボールにおけるスパイク助走軌跡計測器の開発

配管検査ロボット用位置計測器の精度向上 (2017.3)
発表場所:
日本機械学会中国四国学生会第47回学生員卒業研究発表講演会講演前刷集
研究目的:
配管探査ロボットの自己位置計測器に関する研究


配管検査ロボットの自己位置推定に関する研究 (2017.3)
発表場所:
日本機械学会中国四国学生会第47回学生員卒業研究発表講演会講演前刷集
研究目的:
配管探査ロボットの自己位置推定に関する研究

マニピュレータを用いたマーカ追従によるキャリブレーションの提案 (2017.3)
発表場所:
日本機械学会中国四国学生会第47回学生員卒業研究発表講演会講演前刷集
研究目的:
災害探査活動支援用モバイルロボット群の半自律化とインターネット遠隔制御のための
共通マニピュレータ開発に関する研究

Copyright (C) 2012 Orange Project All Rights Reserved.