Team Orange Official Web Site
TOP MAIN INFORMATION TEACHER MEMBERS RESEARCH PROJECT ROBOT LINK
PROJECT HISTORY
弓削古民家調査プロジェクト (2012.04~2013.03)
種類:
受託研究
主催:
しまの大学
目的:
上島町にはいまだ魅力的な古い町並みを残している美しいエリアが散在している.これらの町並みや
民家は地域文化を考える上だけでなく,日本人のこれからの生き方を見直す上でも大変重要な地域の
宝であるといえる.また,美しい町並みは観光資源としても有効に活用できる可能性もある.しかし
昨今は人口減少に伴って空き家が増加し,立派な古民家の中にも管理が行き届いておらず,実際に朽
ち果てていくものも散見される.住まい手も高齢化し,近い将来には空き家となるものも多い.そこ
でこれらの古民家の活用方法を考えるために,記録を残すために調査を行う.



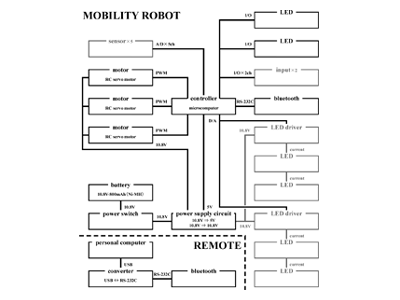
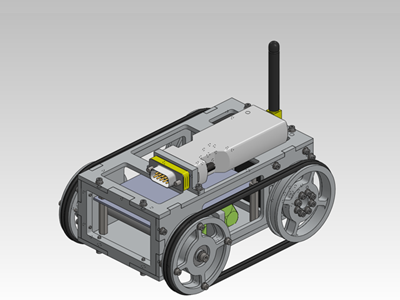
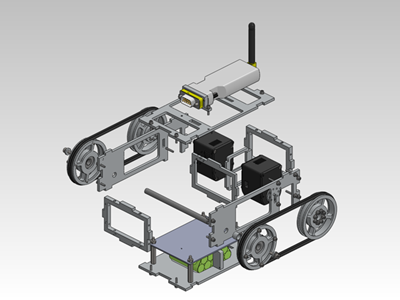
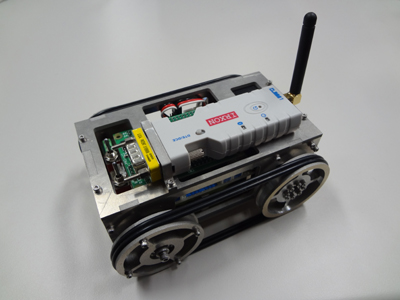
配管検査ロボットに関する研究開発 (2012.12~2015.3)
種類:
共同研究
共同研究先:
株式会社カンツール
研究目的:
排水管・下水管の維持管理は重要であり,継続的に行っていかなければならない.しかし,実際に管
内を調査する作業は人が行うには過酷であり,調査範囲も広大である.そこで,近年ではロボットを
用いた調査が活発に行われている.ところが,これらのロボット調査にも問題があり,有線による外
部制御・外部電源が主流であることから,ロボットシステム全体が大掛かりなものとなり,メンテナ
ンス性が悪い上,高価なシステムとなっている.そこで,本研究ではこれまで研究してきたレスキュ
ーロボットのノウハウを活かし,小型で持ち運びが容易な配管検査ロボットの開発を行う.
災害探査ロボット群の半自律化とインターネット遠隔制御 (2013.4~2016.3)
種類:
科学研究費助成事業基盤研究(B)
研究目的:
我々はレスキューロボットを用い, 消防関係者との実証実験などを通して,災害時に必要となる探
査ロボットには"遠隔操縦を基本とした半自律制御系"が最も重要であるという結論に至った.これは
災害時における探査で,迅速かつ正確であることに加え, 人命が掛かった失敗が許されない過酷な
条件下では,環境認識技術等のレベルが低いロボットに全ての判断を委ねることができないことが上
げられる.また一方で,ロボットの全行動判断に対して,人間が全てに介在することは大きな負担に
なることが挙げられる.さらに災害現場において1台のロボットで探査活動を行うには限界がある.
そこで本研究では,ロボット群を少数のオペレータにより操作できる探査効率の高いシステム構造へ
拡張を行う.

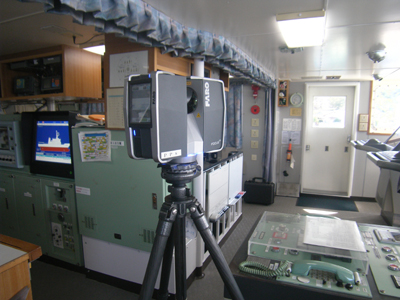
練習船弓削丸の三次元形状の計測と応用の研究 (2013.11~2014.9)
種類:
共同研究
共同研究先:
有限会社柏原工業
研究目的:
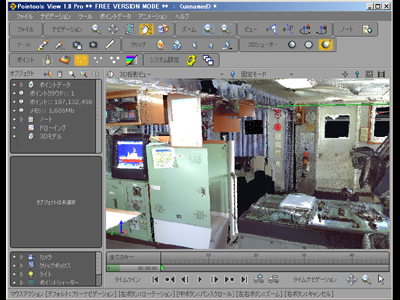
練習船弓削丸の内外の三次元形状データをレーザースキャンによって取得し,3D映像を制作する.
またその応用の可能性として,船舶の部品管理の効率化や,船員の教育訓練の高度化など,広く社会
に寄与できると考えている.


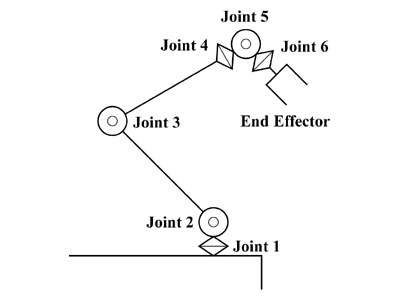
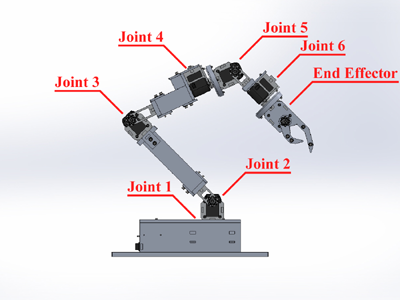
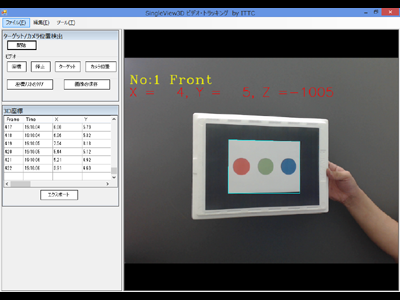
船舶火災における探査活動が可能なレスキューロボットの開発 (2016.4~2019.3)
種類:
科学研究費助成事業若手(B)
研究目的:
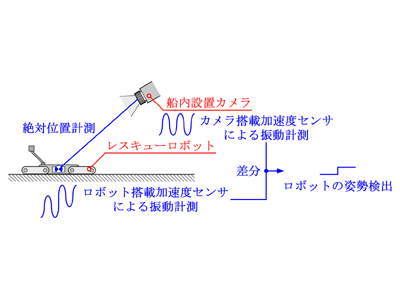
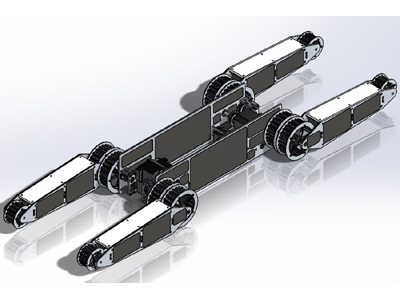
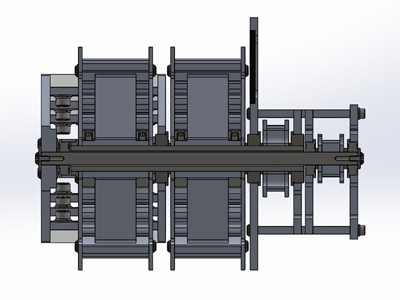
現在,船舶で発生した火災事故への対応は,主に船員が行っているが,火災事故の現場での探査は,
熱や煙,風波などの影響を受けるため,陸上に比べて極めて困難である.本研究では,これまで開発
したレスキューロボットをもとに,波の影響を受けない,自己姿勢を把握した状態で走行できるロボ
ットを新たに開発する.また,床面に設置したマーカから自己位置補正を実現する機能も併せ持つ.

擬似波浪発生ジンバルの研究開発 (2017.6~2018.3)
種類:
共同研究 [豊橋技術科学大学 高専連携教育研究プロジェクト]
共同研究先:
豊橋技術科学大学 情報・知能工学系 三浦研究室
研究目的:
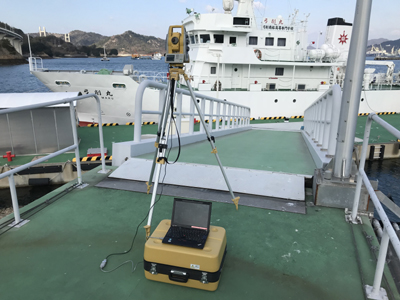
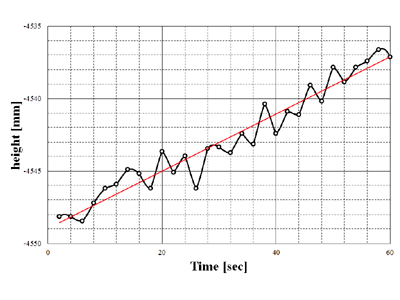
本プロジェクトでは,まずファーストステージとして弓削商船高等専門学校の練習船「弓削丸」を用
いて波の波浪データを計測し,そのデータを基に波浪を忠実に再現する駆動ジンバルを作成すること
で,疑似的に船舶の甲板を再現し,海に面していない場所であっても,容易に実験・検証が行える環
境を構築することを目指す.


Copyright (C) 2012 Orange Project All Rights Reserved.