Mini Robot Contest 2013 Official Web Site
TOP MAIN INFORMATION RULE MEMBERS ROBOT TOURNAMENT LINK MANAGEMENT
INTRODUCTION OF ROBOTS
阿南工業高等専門学校
|
学校名
|
阿南工業高等専門学校
|
|
クラブ名
|
ロボット研究部
|
|
|
|
チーム名
|
TAMIYAマン(タミヤマン)
|
|
ロボット名
|
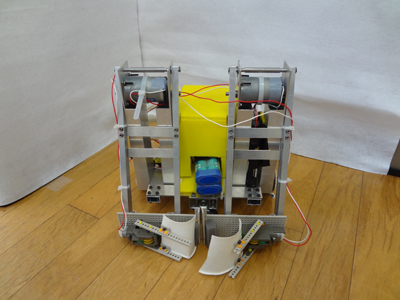
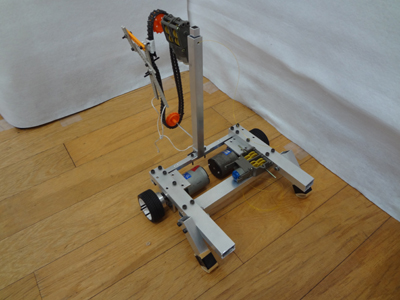
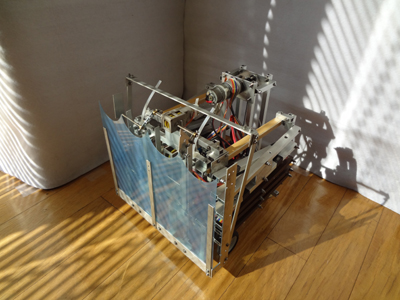
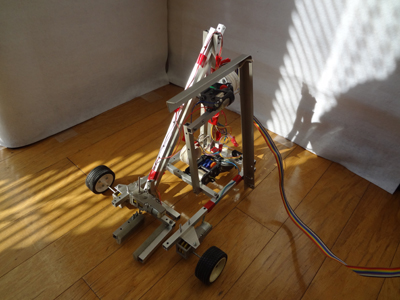
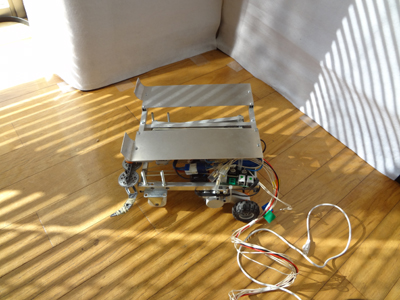
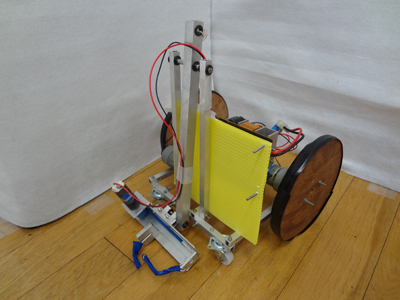
ソルダーアシスト
|
|
製作者名
|
沼島 孝哉(ヌシマ タカヤ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
ソルダーアシストって,何気にわびさびよね~
|
|
|
|
|
チーム名
|
TAMIYAマン(タミヤマン)
|
|
ロボット名
|
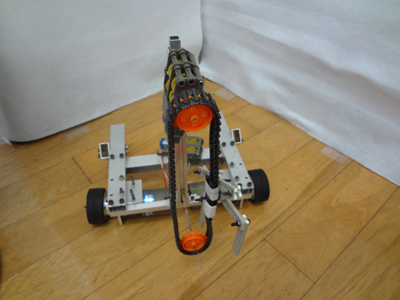
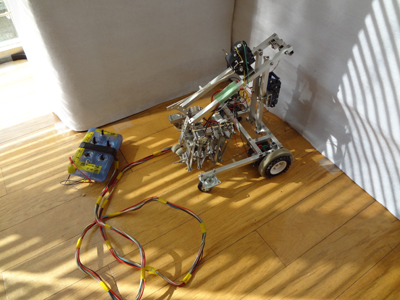
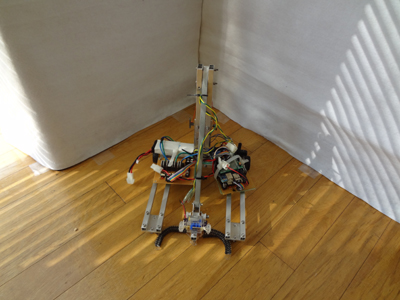
ペペロンチーノ
|
|
製作者名
|
島崎 禄(シマサキ ロク)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
ヒューズがひょ~~んwww
|
|
|
|
|
チーム名
|
めっちゃメカメカ
|
|
ロボット名
|
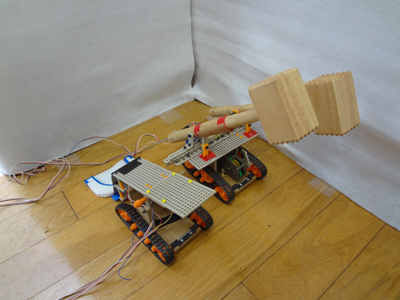
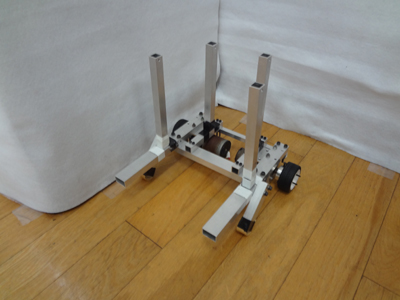
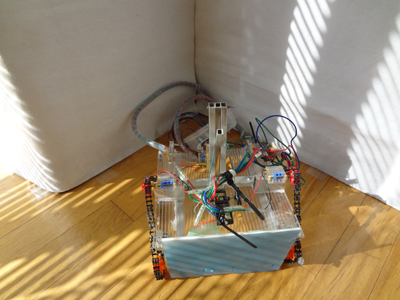
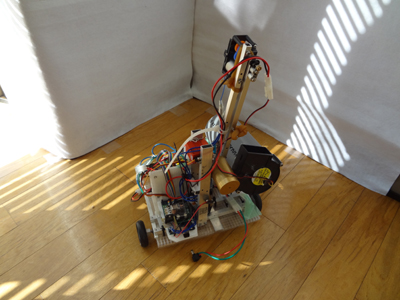
親方Mk.Ⅱ(オヤカタマークツー)
|
|
製作者名
|
西田 心(ニシダ ココロ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
一週間で作りました.
600の塔にも積みにいきます. |
|
|
|
|
チーム名
|
めっちゃメカメカ
|
|
ロボット名
|
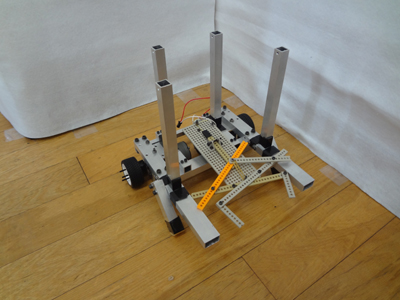
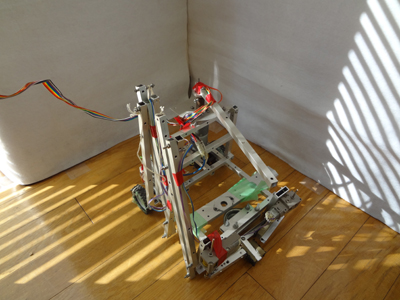
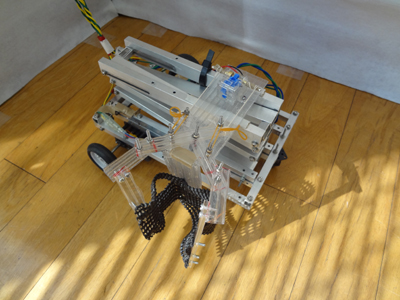
MAP兵器(マップヘイキ)
|
|
製作者名
|
市川 慎吾(イチカワ シンゴ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
名前のように,素早く点を取ります.
|
|
|
|
|
チーム名
|
疾風迅雷(シップウジンライ)
|
|
ロボット名
|
風神(フウジン)
|
|
製作者名
|
大久保 裕太(オオクボ ユウタ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
風のように速く動きます.
|
|
|
|
|
チーム名
|
疾風迅雷(シップウジンライ)
|
|
ロボット名
|
雷神(ライジン)
|
|
製作者名
|
新谷 直士(ニイヤ ナオト)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
フィールド上を疾風迅雷のごとく走り回ります.
|
|
|
|
|
チーム名
|
天下統一(テンカトウイツ)
|
|
ロボット名
|
織田 秀吉(オダ ヒデヨシ)
|
|
製作者名
|
河野 修大(カワノ シュウタ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
力強いロボットが天下統一を目指します.
|
|
|
|
|
チーム名
|
天下統一(テンカトウイツ)
|
|
ロボット名
|
信長 秀吉(ノブナガ ヒデヨシ)
|
|
製作者名
|
高石 晃志(タカイシ コウシ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
戦国武将がどんどん領地を占領していきます.
|
|
香川高等専門学校 高松キャンパス
|
学校名
|
香川高等専門学校 高松キャンパス
|
|
クラブ名
|
機械システム研究部
|

|
|
|
チーム名
|
INGOT(インゴット)
|
|
ロボット名
|
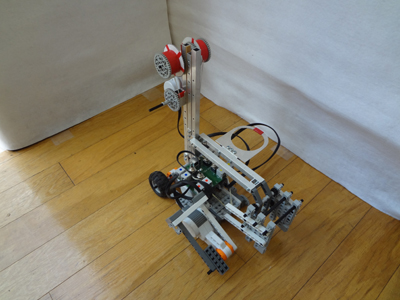
INゴワッT(インゴワット)
|
|
製作者名
|
茶本 直(チャモト ナオ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
400㎜の高さの台座まで紙コップを置くことができます.
|
|
|
|
|
チーム名
|
INGOT(インゴット)
|
|
ロボット名
|
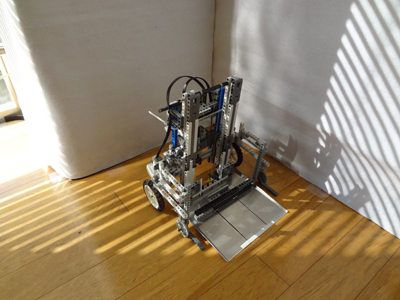
剣もひょろろ(ケンモヒョロロ)
|
|
製作者名
|
谷川 豊章(タニカワ トヨアキ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
昨日の今日も動かなかったロボットが今日,参戦!!重量なんと4kg.アわわわわ…
|
|
|
|
|
チーム名
|
べじたりあん36号(ベジタリアンサンジュウロクゴウ)
|
|
ロボット名
|
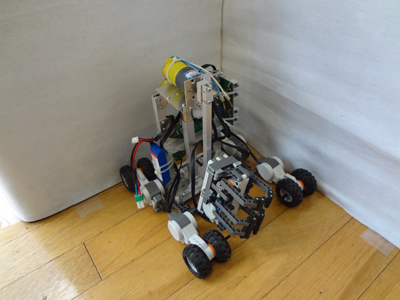
べじたりあん6号(ベジタリアンロクゴウ)
|
|
製作者名
|
六車 佳仁(ムグルマ ヨシヒト)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
パンタグラフに部に代々伝わるネギを取り付けて紙コップを持ち上げる機構です.
|
|

|
|
|
チーム名
|
べじたりあん36号(ベジタリアンサンジュウロクゴウ)
|
|
ロボット名
|
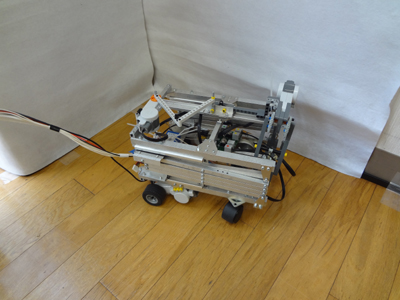
べじたりあん30号(ベジタリアンサンジュウゴウ)
|
|
製作者名
|
三井 智広(ミツイ トモヒロ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
平行リンクに部に代々伝わる左腕を取り付けて紙コップを握り潰す,もとい掴む機構で
す. |
|

|
|
|
チーム名
|
team Cthulhu(チーム クトゥルフ)
|
|
ロボット名
|
ミ=ゴ(ゴーミ)
|
|
製作者名
|
平井 裕貴(ヒライ ユウキ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
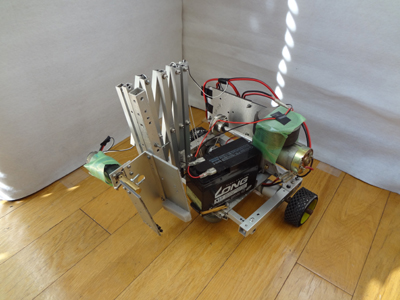
二連スライダリンクによる800mmまでの高速展開,かつ総重量1.5kg以下かつオムニ
ホイールによる全方向平行移動により,素早い領土接収を目指したロボット. |
|
|
|
|
チーム名
|
team Cthulhu(チーム クトゥルフ)
|
|
ロボット名
|
這い寄る混沌(ニャルラトホテプ)
|
|
製作者名
|
山下 純平(ヤマシタ ジュンペイ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
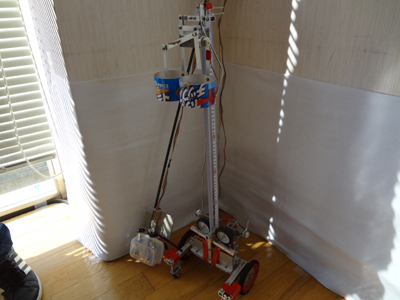
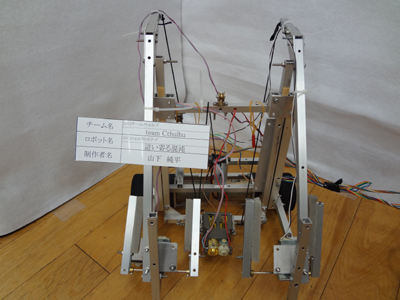
スライダーによる上下運動と平行リンクにより,高さ約650mmまでの変形を実現し
た,操作性も高いロボット. |
|
|
|
|
チーム名
|
ヒロイン
|
|
ロボット名
|
悪の組織(アクノソシキ)
|
|
製作者名
|
藤澤 賢(フジサワ サトル)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
このロボットは平行リンクを二つ用いて紙コップを持ち上げています.一つ目の平行リ
ンクと二つ目の間に糸をつけているのは岩崎さんのアイデアで気づいたらできていまし た.カウンターウエイトのモータにも注目です. |
|
|
|
|
チーム名
|
ヒロイン
|
|
ロボット名
|
主人公の彼女(シュジンコウノカノジョ)
|
|
製作者名
|
岩崎 達彦(イワサキ タツヒコ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
すごく…重たいです.
パンタグラフで持ち上げます. |
|
|
|
|
チーム名
|
オリーブシード
|
|
ロボット名
|
ザ・ワールド・レクイエム
|
|
製作者名
|
飯尾 信二郎(イイオ シンジロウ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
ロボコンからの,テストからの,総文とか時間なさ杉.メジャーで上げます.タイヤを
自作しましたが,無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無 駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄 無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄無駄ッ!!!オラオラオラオラオラ オラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオ ラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラ オラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオラオッ!!!ア リアリアリアリアリアリアリアリアリアリアリアリアリアリアリアリアリアリアリ,ア リーヴェデルチ(さよならだ)!!!on the stage!!! |
|
|
|
|
チーム名
|
オリーブシード
|
|
ロボット名
|
カツブシ!
|
|
製作者名
|
山本 怜央(ヤマモト レオ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
操縦がんばりますッ!
|
|
|
|
|
チーム名
|
麺類(メンルイ)
|
|
ロボット名
|
うどん
|
|
製作者名
|
大山 禎人(オオヤマ ヨシヒト)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
アームの数を増やしました.
|
|
|
|
|
チーム名
|
麺類(メンルイ)
|
|
ロボット名
|
そば
|
|
製作者名
|
関 英一郎(セキ エイイチロウ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
ロボットの構造を大きく変更し,パンタグラフを平行リンクにしました.
|
|
|
|
|
チーム名
|
オールドキング
|
|
ロボット名
|
レイジングトレント
|
|
製作者名
|
笠井 誠治(カサイ セイジ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
速い!
重い! 強い! 平行リンクを使って持ち上げます.目指すは優勝です. |
|
|
|
|
チーム名
|
オールドキング
|
|
ロボット名
|
ソレノイド
|
|
製作者名
|
奥谷 健太(オクタニ ケンタ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
速い!
強い!! 重い!!! 目指すは優勝 |
|
香川高等専門学校 詫間キャンパス
|
学校名
|
香川高等専門学校 詫間キャンパス
|
|
クラブ名
|
ロボコン部
|
|
|
|
チーム名
|
Euler(オイラー)
|
|
ロボット名
|
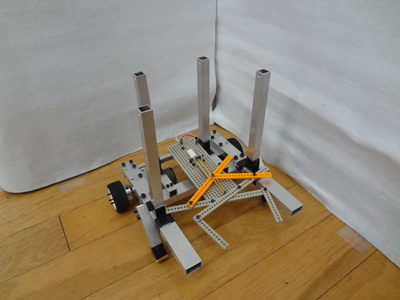
Π(パイ)
|
|
製作者名
|
河上 岳(カワカミ ガク)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
本体を起き上がらす機構と,スロープを伸ばす機構に苦労した.両方を実現するための
軽量化に,一番手を焼いた. |
|
|
|
|
チーム名
|
Euler(オイラー)
|
|
ロボット名
|
Σ(シグマ)
|
|
製作者名
|
岡本 昌也(オカモト マサヤ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
糸を巻き上げる機構のところの加工には苦労した。モーターの少なさに注目!
|
|
|
|
|
チーム名
|
エナジードリンク
|
|
ロボット名
|
グロンファイター
|
|
製作者名
|
美濃 賢太(ミノ ケンタ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
・フレームがコの字になっている.
・マシンが進むたびにウィリーする. ・きちんと動くように頑張ります. |
|
|
|
|
チーム名
|
エナジードリンク
|
|
ロボット名
|
ライトップD(ライトップディー)
|
|
製作者名
|
間部 僚太(マベ リョウタ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
紙コップをキャッチする機構や,アームを回転させる機構に苦労しました.
今回も短い製作期間でしたが,全力を出して頑張ります. |
|
|
|
|
チーム名
|
six trees(シックスツリーズ)
|
|
ロボット名
|
ρ(ロー)
|
|
製作者名
|
森 由有也(モリ ユウヤ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
パンタグラフ機構を使い60cm越えを可能にした.
また機動性にも優れている. |
|
|
|
|
チーム名
|
six trees(シックスツリーズ)
|
|
ロボット名
|
GANMA(ガンマ)
|
|
製作者名
|
森 拓人(モリ タクト)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
トルク不足に困った.参った.詰んだ…..ah-コマッタナーw
|
|
高知工業高等専門学校
|
学校名
|
高知工業高等専門学校
|
|
クラブ名
|
ロボット研究部
|

|
|
|
チーム名
|
WAKI☆BARA(ワキバラ)
|
|
ロボット名
|
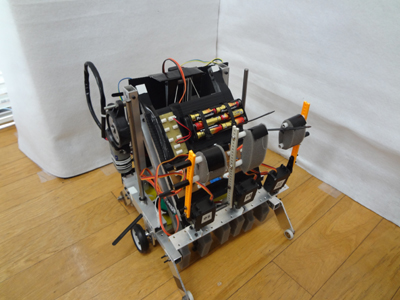
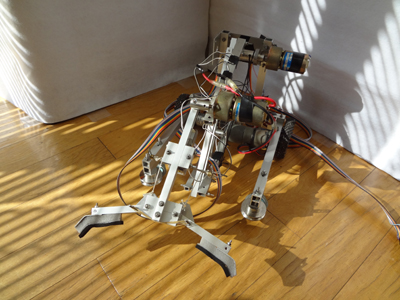
O-HR(オヘラ)
|
|
製作者名
|
大原 凌平(オオハラ リョウヘイ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
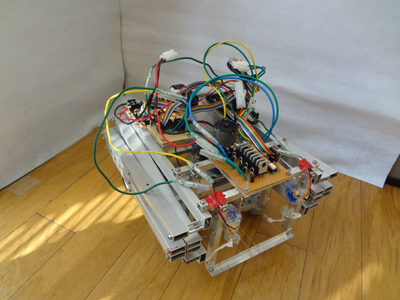
ファンの吸引を利用して紙コップを持ち上げる.ファンを上下する機構にパンタグラフ
を採用して確実な動きで紙コップを台座の上に置く.タイヤはアルミ板から切り出した 円形上,つまり自作のものを使用.左右のモーターの動力をVベルトで伝達して上下2 個のタイヤを駆動させる.Vベルトを扱う為に,φ40のアルミ軸に普段はやらない大量 の円筒削りとV溝切削を行ったが,普段やらない分苦戦した. |
|
|
|
|
チーム名
|
WAKI☆BARA(ワキバラ)
|
|
ロボット名
|
ガタック
|
|
製作者名
|
中脇 優輝(ナカワキ ユウキ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
ロボットの特徴:2本の爪で紙コップをつかみ,平行四辺形のリンクを使ってアームを
上げます. 苦労した点:書類仕事やってたらミニロボ作る時間がどんどんなくなっていったこと. |
|
|
|
|
チーム名
|
limit.(リミット)
|
|
ロボット名
|
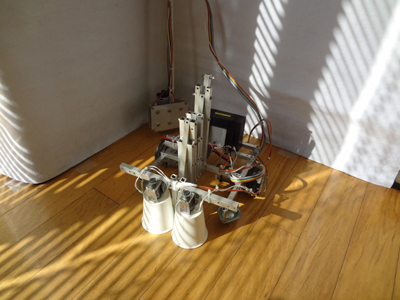
吸引力を使ったただ一つでもないナニカ
(キュウインリョクヲツカッタタダヒトツデモナイナニカ) |
|
製作者名
|
杉本 創(スギモト ハジメ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
紙コップをファンを使って吸引することによって,つかみます.
サーボモーターでアームを回すことにより高さを調節します. アームの中間付近でアームを折りたたむことで,ロボット自身よりも高い場所に紙コッ プを置くことが出来ます. |
|
|
|
|
チーム名
|
limit.(リミット)
|
|
ロボット名
|
パンタつかむくん
|
|
製作者名
|
藤田 龍之介(フジタ リュウノスケ)
|
|
制御方式
|
有線
|
|
ロボット紹介文
|
|
|
このロボットは,パンタグラフを利用したロボットです.まだ初心者なのでなれない
加工や設計に苦労しましたが頑張って制作しました. この写真は未完成ですが,本番のために精一杯頑張って作っています.ご期待くださ い. |
|
|
|
|
チーム名
|
1年5年(イチネンゴネン)
|
|
ロボット名
|
パンタ
|
|
製作者名
|
入谷 彰洋(イリタニ アキヒロ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
ロボットの特徴:紙コップをゴムでつかむロボットです.
苦労したこと:紙コップをつかむところです. |
|
|
|
|
|
チーム名
|
1年5年(イチネンゴネン)
|
|
ロボット名
|
RXのような…(アールエックスノヨウナ…)
|
|
製作者名
|
武田 壱汰(タケダ イチタ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
某RX…のようなロボットを作りたかっただけなんです.まだ紙コップをどうやって上
に上げようか考えています.つまり完成していません. |
|
新居浜工業高等専門学校
|
学校名
|
新居浜工業高等専門学校
|
|
クラブ名
|
ロボット研究会
|
|
|
|
チーム名
|
紅(スカーレット)
|
|
ロボット名
|
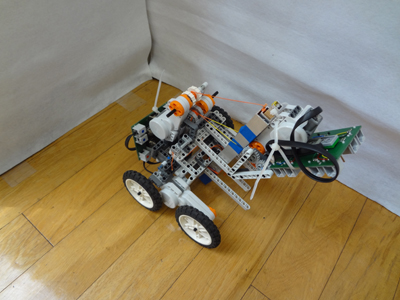
マシンゴーレムダッシュ
|
|
製作者名
|
岸田 樹/大原 航/山内 康平/矢野 陸
(キシダ イツキ/オオハラ ワタル/ヤマウチ コウヘイ/ヤノ リク) |
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
このロボットはもう一台のロボットを上に乗せて600mmをねらえるようにするための
補助用ロボットです.ジャバラ機構使って土台を上げます.スロープを使って,乗せま す.製作時に苦労した点はスロープを上げたり,倒したりする構造を考えるとこです. 【優勝目指して頑張ります!】 |
|
|
|
|
チーム名
|
紅(スカーレット)
|
|
ロボット名
|
初代マシンゴーレム(ショダイマシンゴーレム)
|
|
製作者名
|
岸田 樹/大原 航/山内 康平/矢野 陸
(キシダ イツキ/オオハラ ワタル/ヤマウチ コウヘイ/ヤノ リク) |
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
このロボット単体では,紙コップをつかめず,競技することができませんが,もう一台
のロボットを上に乗せることで,一番高いところも狙えることができます.苦労したと ころは,ロボットを乗せるためのスロープを作るところが,苦労しました.ほかには, ないようなアイデアのロボットなので,アイデア賞を狙えます. |
|
|
|
|
チーム名
|
一(イチ)
|
|
ロボット名
|
のびのびくん
|
|
製作者名
|
佐藤 一彰(サトウ カズアキ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
このロボットは,マジックアームをモデルとしています.
コップを台座に置く方法は,コップを上からつかんでジャバラを伸ばすことによって台 座にコップを置きます. ロボットを作るときに苦労したことは,ジャバラの部分に苦労しました。歩行はオムニ ホイールを使用します. 優勝目指して頑張りたいと思います。 |
|

|
|
|
チーム名
|
一(イチ)
|
|
ロボット名
|
DUST★PAN(ダストスターパン)
|
|
製作者名
|
佐野 隼一(サノ ジュンイチ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
※故障につき,写真と紹介文はありません.
|
|
|
|
|
チーム名
|
満足同盟(チームサティスファクション)
|
|
ロボット名
|
腎臓に威厳,最古消化(ジンゾウニイゲン,サイコショウカ)
|
|
製作者名
|
宇高 啓太(ウダカ ケイタ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
そのロボットはできる限り簡単に紙コップを持ち上げることをパフォーマンスとして今
年に作成されました. このminirobo2013では可能な限り最高のパフォーマンスとそれと同じ程度の大きさの 競技による結果をもたらします. 試合の戦いの内容によっては日本の昔の忍者のようなパフォーマンスを期待しなさい! そのプロジェクトの発案者たちは相手チームに警告を発する. 「対する者たちは集団でゲームの中身にくぎ付け!」 |
|

|
|
|
チーム名
|
満足同盟(チームサティスファクション)
|
|
ロボット名
|
メカウサー ver_REPAIR(メカウサーリペアー)
|
|
製作者名
|
長井 太甫(ナガイ タイスケ)
|
|
制御方式
|
無線
|
|
ロボット紹介文
|
|
|
このロボットは遡ること4年前,2009年に行われたミニロボコン「略奪愛(ウバイアイ)」に
おいて,「デザイン賞」を獲得したロボット「メカウサー」をベースに製作されまし た.遊戯王に登場するモンスターがデザインの元となっています. 従来の「メカウサー」における問題であった走行方法を改善し,よりスムーズな移動を 可能としました.さらに,ロボット外装における装甲をプラスチック等の材料を用いる ことで,強度・整備性での信頼性を高め,見た目も改善されています.制御方法につい ても有線から無線に変更しています. 今回もこのロボットと共に「デザイン賞」を目指していきます. 以下,ネタ 神々の時代より愛されてきたウサギはかつて荒々しいオリオンの怒りを静めるために神 々によって送られた.その姿は今も星座としてオリオンの元に輝いている. 「ロボコニストよ,技術の小宇宙(コスモ)を燃やせ!!」 遊戯王の作品におけるメカウサーは一度,石版に封印されたものの,遊星の活躍により カードとして復活,OCG界でも絶大な人気を誇る. 「リミッター解放レベルMAX!イニシャライズスタート,サブシステム起動!通信状 態,オールクリア!有限の電力よ,時空を突き破り,大いなる勝利を導け GO!デルタ アクセルユニオン!カモン,朱眼の白兎-メカウサー!!」 -------------------------------------- ※「遊☆戯☆王5D's」は,高橋和希の漫画『遊☆戯☆王』を原作としたテレビ東京系 列のアニメ,またはそれを元にして作られた作品です. ※「遊☆戯☆王ZEXALオフィシャルカードゲーム」はコナミデジタルエンタテイメン トが製作・販売しているトレーディングカードゲームです. |
|
Copyright (C) 2012 Orange Project All Rights Reserved.